سیستم فرمان برقی یا EPS چیست؟
مقدمه ای بر سیستم فرمان
متعلقات فرمان روی اکسل جلو درسمت راست و یا چپ اتومبیل بسته شده و هدایت اتومبیل توسط راننده را با تغییر جهت چرخهای جلو امکان پذیر می نماید . بدین معنی که حرکت غربیلک توسط راننده و میله اصلی فرمان به هزار خاری و میله های رابط فرمان و بعد به سگدست منتقل شده و در نتیجه حرکت رفت وبرگشتی یا سمت چپ و راست غربیلک فرمان باعث گردش اتومبیل می شود. سیستم فرمان انواع گوناگونی دارد از جمله سیستم فرمان مکانیکی (دنده شانه ای و پینیون) ،هیدرولیکی و الکتریکی که در این مقاله به توضیح آنها می پردازیم.
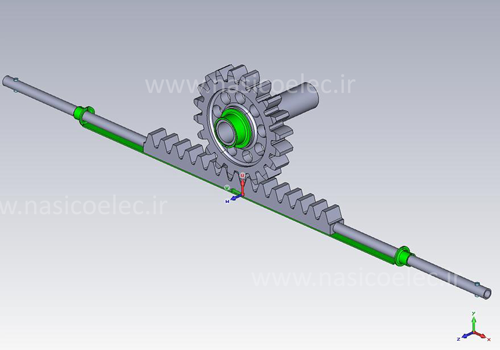
امروزه پیشرفت های علمی و فنی در تمام زمینه ها تحقق یافته و این امر شامل صنایع خودرو سازی و صنایع وابسته نیز شده است. یکی از این صنایع و اجزای وابسته ، قسمت فرمان خودرو است که وظیفه هدایت خودرو از طریق آن میسر می شود. لذا مجموعه تشکیل دهنده این سیستم نقش مهمی در خودرو به عهده دارد. معمول ترین این سیستم ها، سیستم دنده شانه ای و پینیون است. به طوری که پینیون حرکت دورانی داشته و دنده شانه ای حرکت خطی انجام می دهد. در این حال پینیون حرکت دورانی غربیلک فرمان را به دنده شانه ای انتقال داده، دنده شانه ای نیزحرکت خطی را از طریق مفصل ها به چرخ های خودرو انتقال می دهد.
سیر تكاملی سیستم فرمان
یکی از پارامترهای موثر در انتخاب نوع خودرو در کشورهای توسعه یافته راحتی چرخش غربیلک فرمان خودرو می باشد. این موضوع سازندگان خودرو را بر آن داشت که جهت تسهیل در چرخش فرمان و به تبع آن کاهش خستگی راننده وهمچنین افزایش ایمنی با فراهم کردن کنترل بهتر در جاده های خشن ، یک سیستم هیدرولیکی به قسمت مکانیکی اضافه نمایند. معمولا این سیستم جانبی به صورت کمکی عمل می نماید، یعنی وظیفه اصلی همچنان به عهده قسمت مکانیکی است. پمپ هیدرولیک ، مخزن روغن ، تسمه ، شیرهای کنترل ، لوله های رابط سیلندر و ... از اجزای اضافه شده به قسمت مکانیکی فرمان هستند تا فرمان خودروهیدرولیکی شود.
سیستم هیدرولیکی فرمان جهت ایفای نقش از موتور خودرو استفاده می کند. بنابراین از بازده موتور کاسته وهمچنین منجر به مصرف انرژی بیشتری می گردد. علاوه بر آن، سیستم هیدرولیک به صورت مرکز آزاد عمل می کند. یعنی حتی در زمانی که خودرو به صورت مستقیم در حال حرکت است و هیچ انحرافی ازمسیر ندارد ، باز هم این سیستم عمل می کند. این موارد سازندگان فرمان خودرو را بر آن داشت تا به دنبال سیستم های بهتر و مفیدتری بوده تا آن را جایگزین سیستم های هیدرولیکی نمایند .
یکی از سیستم های ارائه شده در سال های اخیرفرمان الکتروهیدرولیکی (EHPS) است که در آن به جای استفاده از موتور خودرو، یک موتور الکتریکی به پمپ هیدرولیک اضافه می شود و در نتیجه فرمان از موتور مستقل می گردد. خودروی پژو407 از این نوع سیستم فرمان استفاده می کند. دراین نوع فرمان هر چند مسئله مستقل بودن از موتور خودرو تحقق یافته است ولی مشکل دائمی بودن عملکرد سیستم هیدرولیکی هنوز پا برجاست. به عبارت دیگر باید تنها هنگامی که چرخشی به فرمان وارد می شود عملکرد سیستم اتفاق بیافتد .

فرمان الكتریكی (Electronic Power Steering (EPS
این نوع فرمان مشابه فرمان هیدرولیکی عمل می کند ولی از لحاظ ساختار متفاوت بوده و دارای مزایای زیادی نسبت به نوع هیدرولیکی است. این سیستم در اواسط دهه 70 برای اولین بار مطرح گردید اما ساخت و کاربرد عملی آن از سال 1993 شروع شد. اولین بار شرکت HONDA در اتومبیل های رالی NSX از فرمان الکترونیکی استفاده نمود. در این سیستم ، مشکل دائمی بودن عملکرد سیستم کمکی فرمان حل شده است به طوریکه سیستم الکتریکی زمانی عمل می کند که چرخشی در فرمان به وجود آید و یا به عبارت دیگر گشتاوری وجود داشته باشد . فرمان الکتریکی از سه قسمت اساسی تشکیل شده است که به سیستم فرمان مکانیکی (Rack and pinion) اضافه می شود :
- سنسورگشتاور (Torque Sensor)
- موتور با جریان مستقیم (Motor Brushless DC)
- واحد کنترل الکترونیکی (ECU)
سه قسمت یاد شده می توانند در یک محفظه (Housing) یا به صورت جداگانه قرارگیرند.

نحوه عملكرد EPS
فرمان الکترونیکی به این صورت عمل می کند که ابتدا سنسور ، گشتاور وارده از غربیلک فرمان را حس نموده و آنرا به صورت سیگنال یا سیگنالهایی به واحد کنترل الکترونیکی ( ECU ) ارسال می کند . میکروکنترلر یونیت فرمان الکترونیکی علاوه بر این سیگنال ، سیگنالی نیز از سرعت خودرو دریافت می کند. آنگاه این دو را پردازش نموده و دستور العمل لازم را به قسمت موتور DC اعمال می نماید تا به صورت کمکی (Assisted) سیستم فرمان مکانیکی را تحت تاثیر قرار دهد. بنابراین دستور العملهای ECU به موتور Brushless تابعی از خروجی سنسور گشتاور و سرعت خودرو است. این یعنی به منظور ایمنی بیشتر خودرو سرعت درعملکرد EPS موثر بوده و بیشترین عملکرد در سرعتهای پایین و کمترین عملکرد فرمان در سرعت های بالای خودرو است.
فرمان الکتریکی در سه حالت مختلف می تواند بر روی قسمت مکانیکی نصب شود .
الف) نصب روی ستون فرمان (C-EPS):
در این روش مجموعه سنسورها ، موتور DC و قسمت ECU بطور مجتمع در یک محفظه مستقر و روی ستون فرمان (Column- Steering) نصب می شود. بنابراین عملکرد کمکی (Assisted) فرمان EPS به ستون فرمان اعمال می گردد. این روش در خودروهای کوچک، مخصوصا خودروهای درون شهری که راحتی فرمان فاکتور مهمی درترافیک های سنگین و پارک نمودن خودرو محسوب می شود ، بکار می رود. ستون فرمان با موتور الکتریکی DC توسط دنده حلزونی درگیر هستند .

ب) نصب روی پینیون (P-EPS) :
در این روش نیز مجموعه سنسورها ، موتور DC و قسمت ECU بطور مجتمع در یک محفظه قرار گرفته ولی روی پینیون نصب می شوند. این حالت برای خودروهای نیمه سنگین مناسب بوده و راننده این نوع خودروها در راحت ترین حالت می توانند خودرو را هدایت کنند.
ج) نصب روی دنده شانه ای (R-EPS):
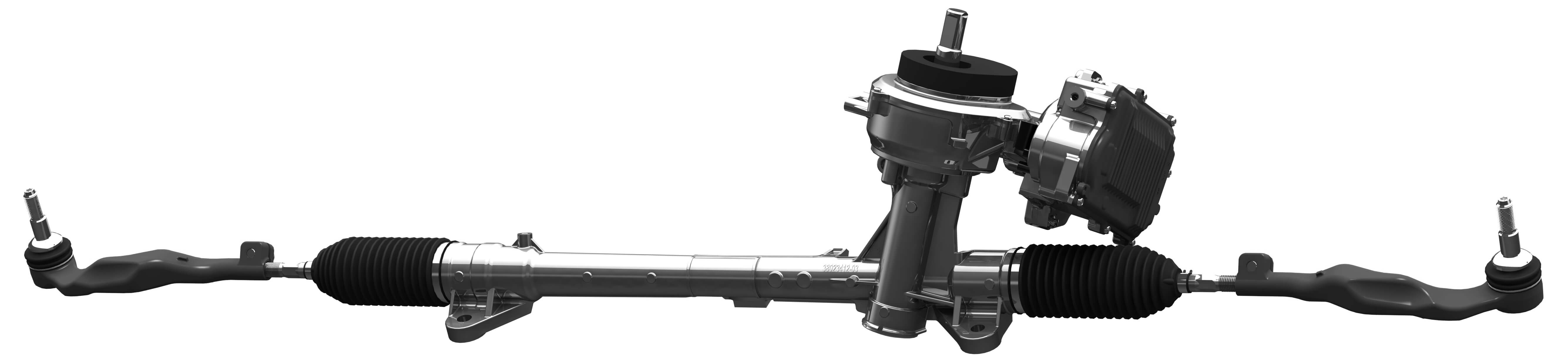
دراین روش هر سه قسمت EPS یعنی سنسور ، موتور DC و ECU جدا از هم روی جعبه فرمان نصب می شوند . به شکلی که موتور DC و ECU جدا از هم روی دنده شانه ای (Rack) قرار گرفته و سنسورها نیز روی پینیون مستقر می شوند. زیرا روی دنده شانه ای گشتاوری وجود ندارد که سنسورها بتوانند آن را حس کنند. این حالت برای خودروهای سنگین که نیروی زیادی باید به دنده شانه ای اعمال شود مناسب است . بنابراین نیروی کمکی (Assisted) به طور مستقیم از موتور DC به دنده شانه ای (Rack) وارد می گردد.

مزایای فرمان الكتریكی نسبت به فرمان هیدرولیكی:
1- حذف پمپ هیدرولیک (pump) وهرزگرد (pulley)
2- حذف شیرهای کنترل (valve) و لوله های رابط
3- حذف تسمه ها بین پمپ هیدرولیک وموتور اتومبیل (belt)
4- حذف جک هیدرولیک (hydraulic jack) و روغن هیدرولیک
5- وزن کم نسبت به سیستم هیدرولیکی
6- تغییرات کمتردر قسمت مکانیکی فرمان هنگام طراحی فرمان الکتریکی نسبت به هیدرولیک
7- عدم کمک (Assist) فرمان در هنگام عدم ورود گشتاور در فرمان الکتریکی(به عبارت دیگر زمانی که گردشی در فرمان داده شود ، قسمت الکتریکی وارد عمل می گردد .)
8- فرمان الکتریکی به صورت Safe Fail است .( چنانچه قسمت الکتریکی به دلایلی از کار افتد، قسمت مکانیکی فرمان می تواند به کار ادامه دهد.)
9- مقداری انرژی مصرفی در فرمان الکتریکی ، حدود یک ششم انرژی مصرفی در فرمان هیدرولیک است. به عبارت دیگر به مقدار 85 % در انرژی مصرفی فرمان الکتریکی نسبت به هیدرولیک صرفه جویی می شود.
10 - کاهش حجم واندازه نسبت به هیدرولیک
11 - مستقل بودن از موتور خودرو
12 - کاهش قابل ملاحظه زمان مونتاژ
13 - افزایش قابل ملاحظه عمر موثر نسبت به فرمان هیدرولیکی
14 - قابلیت ایمنی بالا در شرایط بحرانی
15 - استفاده از یک نوع فرمان الکتریکی در چندین خودروی متفاوت . به عبارت دیگر یک نوع طراحی
اجزای اصلی و کارکرد هرکدام در فرمان EPS
در ادامه به مباحث تخصصی تر در فرمان برقی می پردازیم.
روند پردازش اطلاعات در (EPS)
ماژول کنترل EPS ، نیروی مورد نیاز جهت کمک به کنترل فرمان پذیری را تعیین می کند. همچنین نیروی کمکی اولیه سیستم فرمان را با اضافه نمودن نیروی اینرسی ، چرخش چرخها و کنترل میرایی ، تصحیح می نماید تا احساس بهتری نسبت به کنترل و فرمان پذیری خودرو را بوجود آورد.
با توجه به نتایج حاصل از کنترل های فوق و حداکثر مقادیر اندازه گیری شده، ماژول کنترل EPS جریان هدف را محاسبه می کند. سپس با مقایسه هدف و مقادیر اندازه گیری شده ،جریان مورد نیاز را تنظیم می نماید.
علاوه بر کنترل های معمول ماژول کنترل EPS ، مدلهای تنظیم کمکی نیز دارد که جهت افزایش کنترل ثبات دینامیکی خودرو به آن اضافه شده است . اطلاعات کنترل یونیت AWD که با توجه به شرایط جاده بدست می آید جهت فرمان پذیری بهتر ،توسط BCM به ماژول کنترل EPS ارسال می گردد.
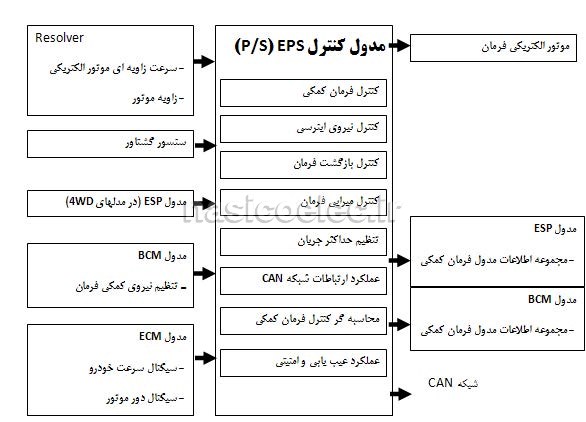
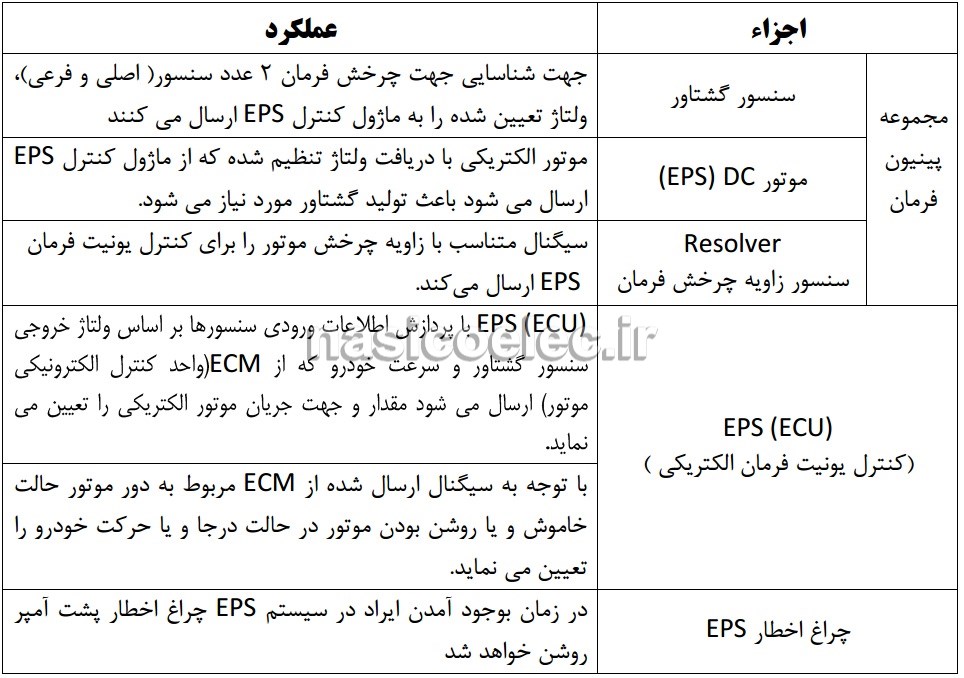
در فرمان برقی معمولا امکانات جانبی و کمکی استفاده می شود که در جهت بهبود عملکرد فرمان در شرایط مختلف می باشد.در جدول زیرلیست از آنها را می بینید.

نحوه عملكرد شفت فرمان (EPS)
درصورتیکه در سیستم فرمان EPS ایرادی بوجود آید سیستم فرمان بدون کمک سیستم EPS و بصورت دستی کار می کند همانند زمانیکه موتور خودرو خاموش باشد.
زمانیکه فرمان به چرخش درمی آید میله پیچشی (bar torsion) نیز به حالت پیچش درمی آید .هنگامیکه منبع تغذیه جریان الکتریسیته موتور EPS قطع شده باشد نیروی کمکی نیز وجود ندارد و نیروی فرمان که توسط راننده اعمال می شود به صورت مستقیم به پنیون فرمان منتقل می گردد.
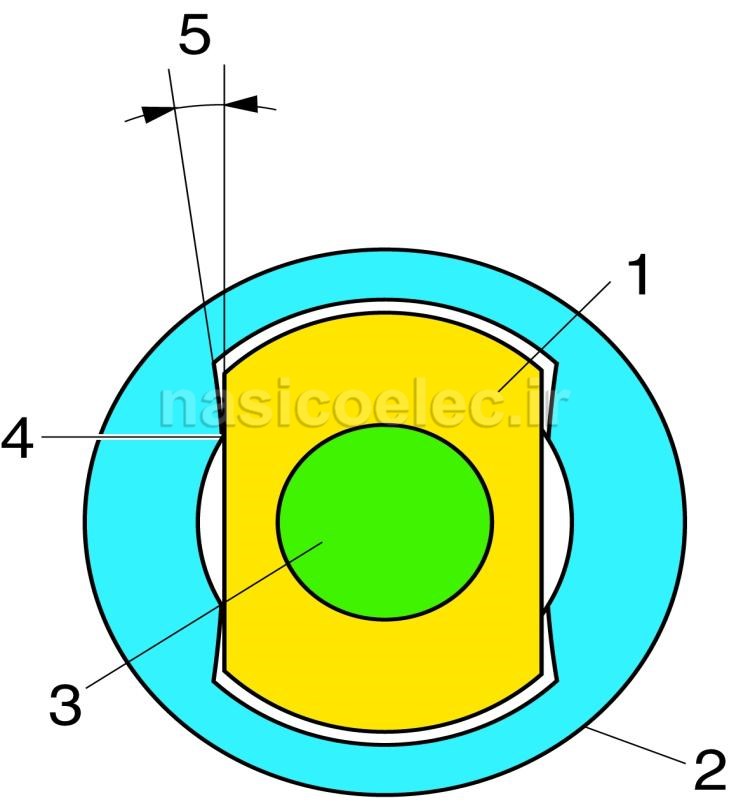 |
شفت ورودی |
1 |
|
شفت خروجی |
2 |
|
|
میله پیچشی |
3 |
|
|
درپوش دستی |
4 |
|
|
حداکثر زاویه چرخش میله پیچشی |
5 |
|
اجزای اصلی پینیون فرمان برقی EPS
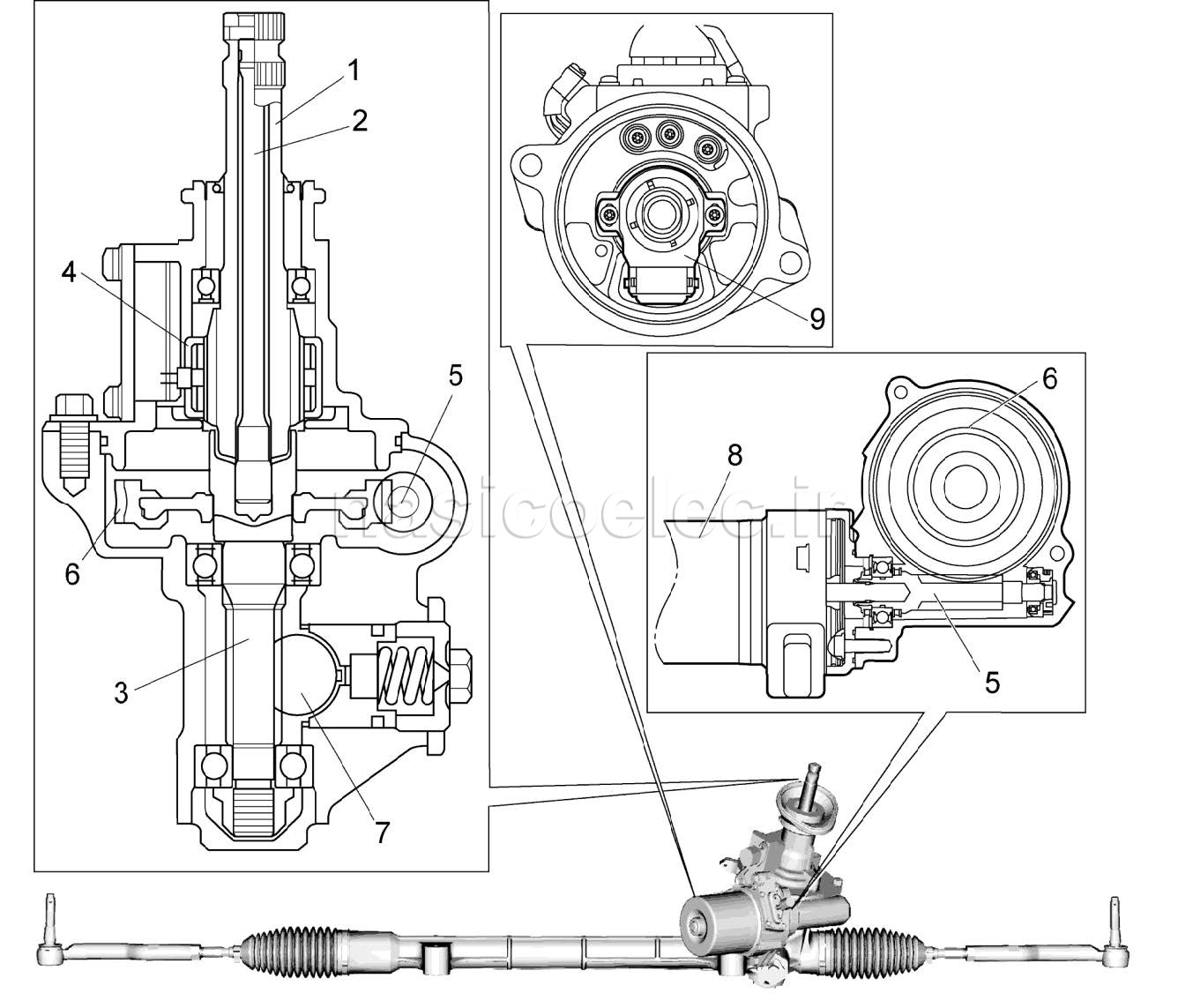 |
شفت ورودی | 1 | |
| میل پیچشی | 2 | ||
| (شفت خروجی)دنده پینیون | 3 | ||
| سنسور گشتاور | 4 | ||
|
دنده مارپیچ |
5 | ||
| چرخ دنده مارپیچ | 6 | ||
| شانه ای فرمان | 7 | ||
| موتور P/S | 8 | ||
| Resolver | 9 | ||
نیروی فرمان از میل فرمان به شفت ورودی (1) اعمال می شود.میل پیچشی داخل شفت ورودی قرار گرفته است. قسمت بالایی میل پیچشی (2) به شفت ورودی از طریق یک پین متصل می باشد.قسمت پایینی میل پیچشی به دنده پینیون فرمان(شفت خروجی)(3) پرس شده است.میل پیچشی تنها هنگامی که شفت ورودی زودتر از شفت خروجی بچرخد پیچیده می شود،این نیروی پیچشی توسط سنسور گشتاور (4) اندازه گیری می شود.
چرخش موتور باعث ایجاد یک نیروی القای الکترومغناطیسی می شود.که توسط resolver (9) که یک جفت سیم پیچ است شناسایی می شود.این سیگنال ارسالی از resolver به عنوان زاویه موتور در نظر گرفته می شود.کنترل مدول P/S سیگنال سنسور گشتاور و resolver را دریافت و سیستم فرمان را کنترل می کند.
اصول عملکرد سنسور موقعیت فرمان یا گشتاورسنج
1- هنگامی که راننده غربیلک را می چرخاند ، ابتدا شفت ورودی می چرخد و به تبع از آن شفت خروجی خواهد چرخید، به دلیل اصطکاک بین جاده و چرخ از آنجاییکه شفت ورودی زودتر از شفت خروجی می چرخد ، میل پیچشی می پیچد.به تناسب بیشتر شدن نیروی اصطکاک پیچش میله نیز بیشتر خواهد شد.
2- زاویه پیچش میله پیچشی توسط ارتباط بین شفت سنسور (4D) و شکاف(4C) معادل سازی می شود.مقدار مغناطیسی همان مقدار تغییرات محور سنسور است (4D) با توجه به جابه جایی بین شفت سنسور(4D) و شکاف (4C) توسط تغییرات مقاومت (اندوکتانس inductance) دو سیم پیچ تشخیص داده می شود.
3- تغییرات مقاومت که توسط سیم پیچ ها تشخیص داده شده توسط آمپلی فایر به سیگنال تبدیل می شود و پس از آن به کنترل مدول P/S ارسال می گردد.
4- هنگامی که فرمان در حالت طبیعی است ولتاژ سیگنال خروجی اصلی و فرعی 2.5V است و گشتاور فرمان 0 نیوتن متر است.در گردش به راست از 2.5v بالاتر می رود و در گردش به چپ از 2.5v پایین تر می آید.
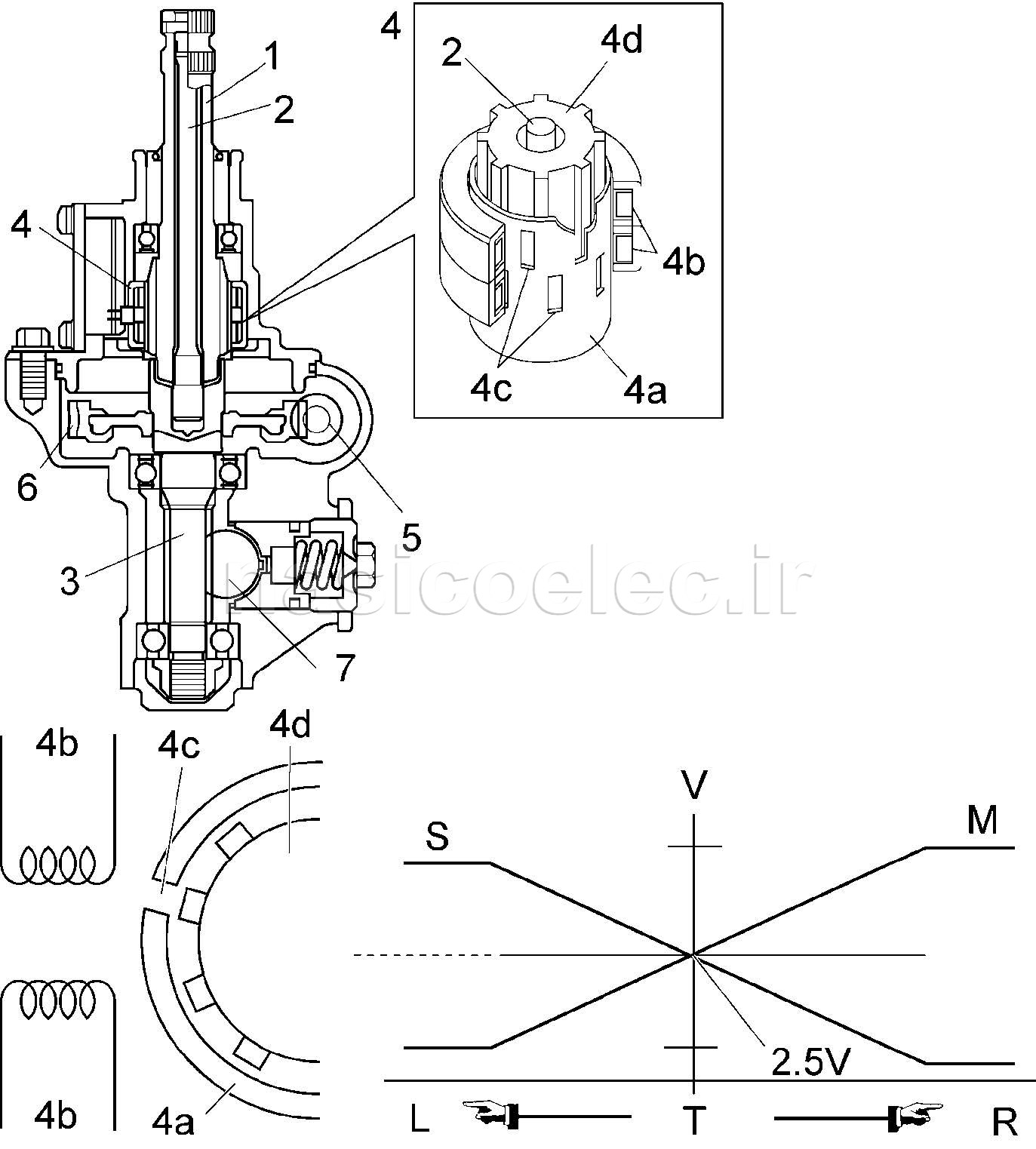 |
Input shaft | 1 |
| Torsion bar | 2 | |
| Pinion gear (output shaft) | 3 | |
| Torque sensor | 4 | |
| Sleeve (input axis) | 4a | |
| Detecting coil | 4b | |
| Slit | 4c | |
| Sensor shaft (output axis) | 4d | |
| Worm gear | 5 | |
| Worm wheel | 6 | |
| Steering rack | 7 | |
| Torque | T | |
| Right turn | R | |
| Left turn | L | |
| Output voltage | V | |
| Main signal | M | |
| Sub signal | S | |
وقتی که فرمان می چرخد ، ماژول کنترل P/S سیگنال سنسور گشتاور را دریافت می کند.محاسبه ارسال جریان متناوب به ترانزیستورها بر اساس سیگنال های دریافتی انجام می شود. با چرخاندن فرمان در ماژول کنترل P/S شش ترانزیستور به صورت ON/OFF در می آیند و باعث ایجاد جریان سه فاز در سیم پیچ استاتور موتور الکتریکی می شود.با تغییر قطبیت هر یک از سیم پیچ های استاتور روتور به صورت گام به گام به چرخش در می آید.
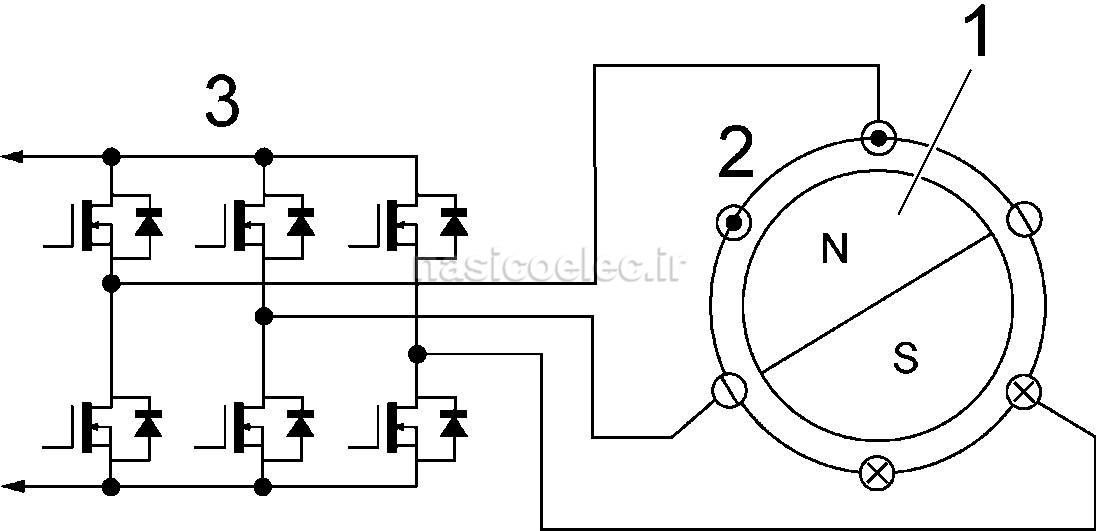 |
Rotor | 1 |
| Stator | 2 | |
| Inverter | 3 | |
وقتی که روتور می چرخد میدان مغناطیسی در سیم پیچ ها تولید می شود. توسط کوئل 1 و 2 تغییر نیروی الکتروموتور بوسیله میدان مغناطیسی مدوله شده تشخیص داده می شود و همچنین بوسیله کوئل تشخیص 1 و 2 ماژول کنترل P/S موقعیت زاویه دقیق موتور را محاسبه می نماید.
کوئل های تشخیص 1 و 2 در زاویه 90 درجه ای نسبت به هم نصب شده اند به همین دلیل نیروی ناشی از الکتروموتور اختلاف فاز 90 درجه ای دارند و باعث می شود سیم پیچ ها تولید موج سینوسی و کسینوسی نمایند.
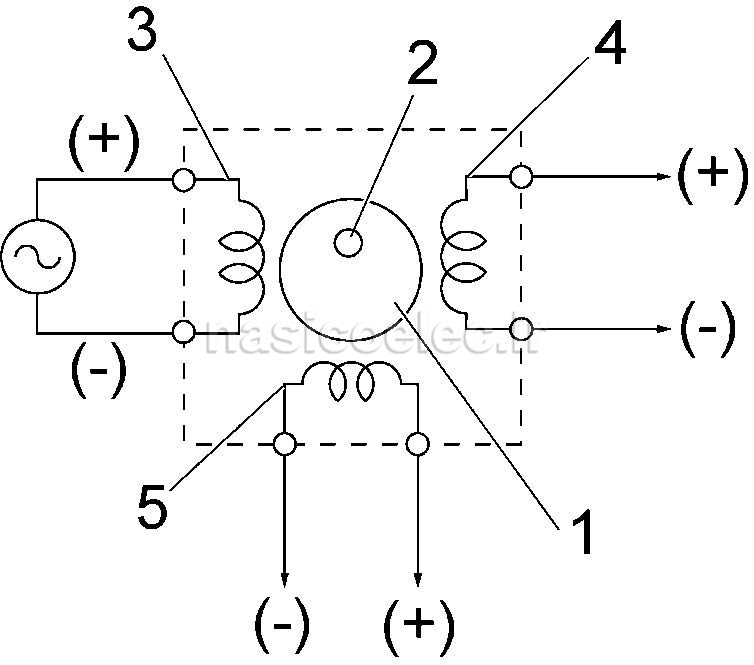 |
Motor shaft | 1 |
| Rotor | 2 | |
| Exciting coil | 3 | |
| Detecting coil 1 | 4 | |
| Detecting Coil 2 | 5 | |
ترجمه و تدوین : مسعود معظم
بسیار عالی و مفید بود.
اطلاعات خوبی بود متشکرم
رو چه ماشینهایی الان در ایران نصب میشه
خودروی بنده سراتو مدل 2014 میباشد. هنگام خروج از پارک ، خودرویی با چرخ جلوی سمت چپ بنده با سرعتی بسیار کم برخورد کرده است. بعد از برخورد غربیلک فرمان بصورت آزاد میچرخد و ارتباطی با مجموعه فرمان ندارد. جهت کنار کشیدن خودرو مجبور شدم با دست چرخها را به زاویه مناسب در آورم و بعد با استفاده از نیروی خود ماشین به کتار خیابان رفتم. (منظور از گفتن این مطلب این بود که بگویم مجموعه قطعاتی نظیر سیبک و سگدست و میل فرمان سالم هستند) به نمایندگی مراجعه کردم که بیان شد دچار بریدن پینیون شده. البته مورد توجه خودم قرار گرفت که چطور ممکنه پینیون ببره اونم با این برخورد بسیار کوچک ، که اگر اینگونه باشه این خودرو اصلا ایمنی مناسبی نداره.
حال این سوال مطرح است که چرا ارتباط بین غربیلک و جعبه فرمان قطع شده؟